VRSketchPen: Unconstrained Haptic Assistance for Sketching in Virtual 3D Environments
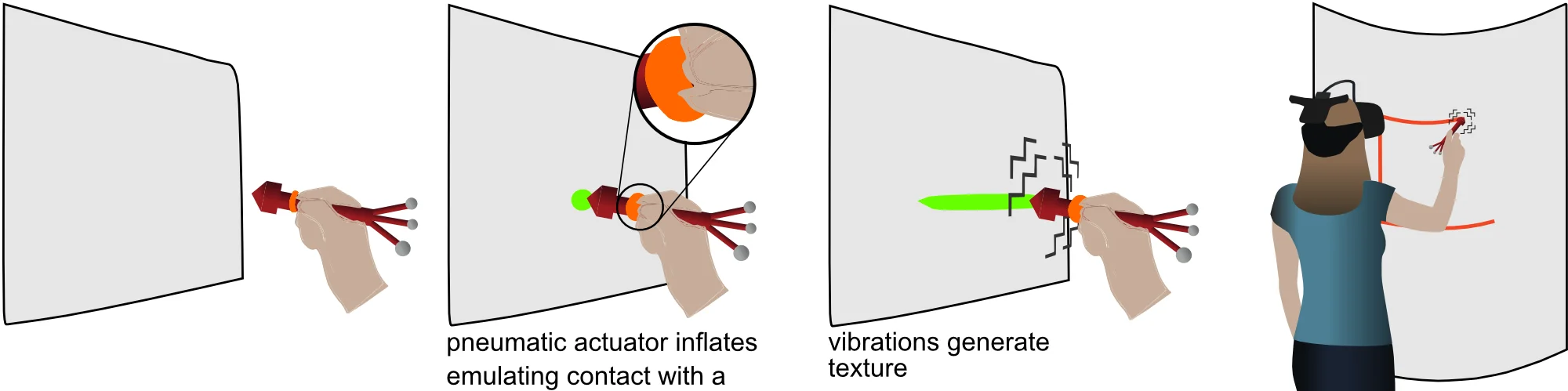
Accurate sketching in virtual 3D environments is challenging due to aspects like limited depth perception or the absence of physical support. To address this issue, we propose VRSketchPen – a pen that uses two haptic modalities to support virtual sketching without constraining user actions: (1) pneumatic force feedback to simulate the contact pressure of the pen against virtual surfaces and (2) vibrotactile feedback to mimic textures while moving the pen over virtual surfaces. To evaluate VRSketchPen, we conducted a lab experiment with 20 participants to compare (1) pneumatic, (2) vibrotactile and (3) a combination of both with (4) snapping and no assistance for flat and curved surfaces in a 3D virtual environment. Our findings show that usage of pneumatic, vibrotactile and their combination significantly improves 2D shape accuracy and leads to diminished depth errors for flat and curved surfaces. Qualitative results indicate that users find the addition of unconstraining haptic feedback to significantly improve convenience, confidence and user experience.
Publication
Hesham Elsayed,
Mayra Donaji Barrera Machuca,
Christian Schaarschmidt,
Karola Marky,
Florian Müller,
Jan Riemann,
Andrii Matviienko,
Martin Schmitz,
Martin Weigel,
and
Max Mühlhäuser
VRSketchPen: Unconstrained Haptic Assistance for Sketching in Virtual 3D Environments
In Proceedings of ACM VRST ’20.
Project Page
PDF
BibTeX
DOI
Full Paper