Hesham Elsayed, Martin Weigel, Johannes Semsch, Max Mühlhäuser, and Martin Schmitz
Tactile Vectors for Omnidirectional Arm Guidance
In Proceedings of Augmented Humans (AHs '23).
Project Page PDF BibTeX DOI Full Paper
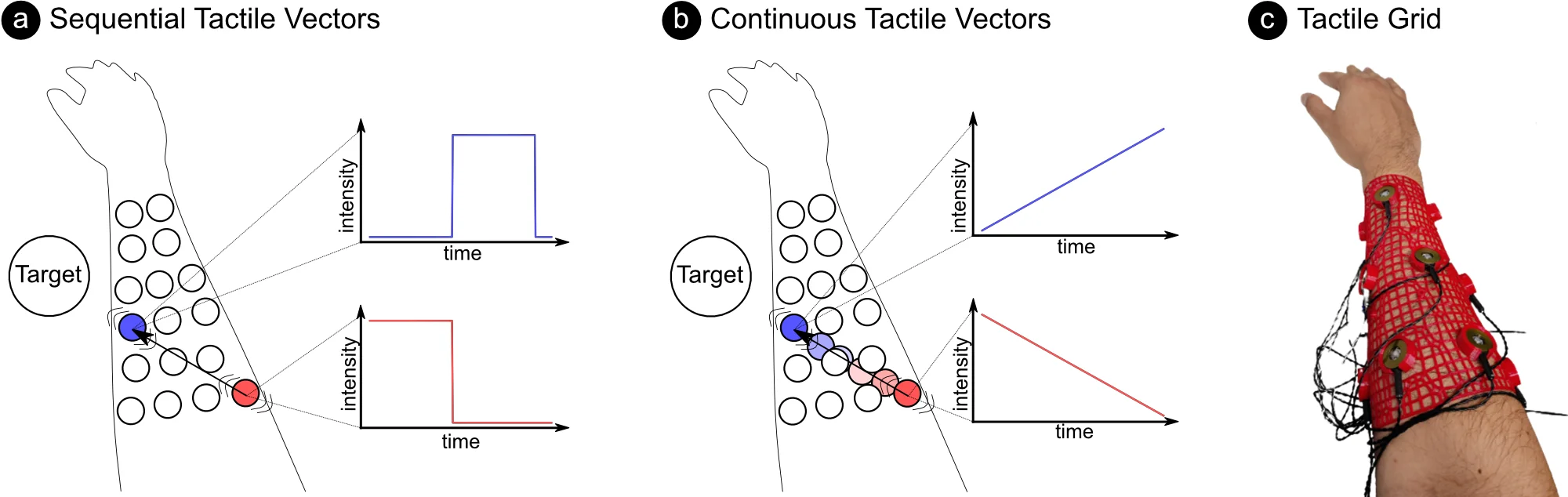
We introduce and study two omnidirectional movement guidance techniques that use two vibrotactile actuators to convey a movement direction. The first vibrotactile actuator defines the starting point and the second actuator communicates the endpoint of the direction vector. We investigate two variants of our tactile vectors using phantom sensations for 3D arm motion guidance. The first technique uses two sequential stimuli to communicate the movement vector (Sequential Tactile Vectors). The second technique creates a continuous vibration vector using body-penetrating phantom sensations (Continuous Tactile Vectors). In a user study (N = 16), we compare these two new techniques with state of the art push and pull metaphors. Our findings show that users are 20% more accurate in their movements with sequential tactile vectors.
Hesham Elsayed, Martin Weigel, Johannes Semsch, Max Mühlhäuser, and Martin Schmitz
Tactile Vectors for Omnidirectional Arm Guidance
In Proceedings of Augmented Humans (AHs '23).
Project Page PDF BibTeX DOI Full Paper